E-mail:

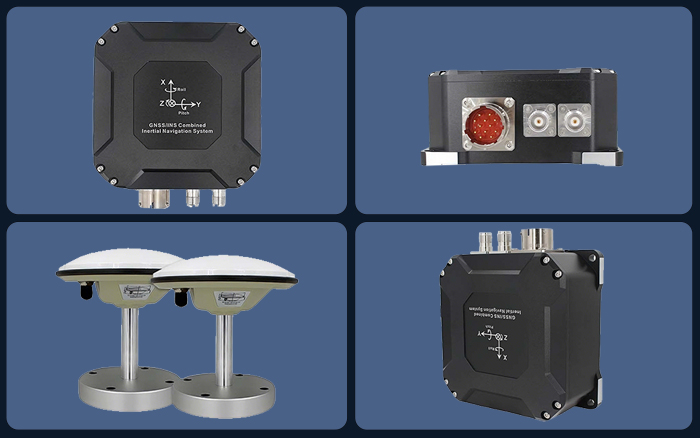






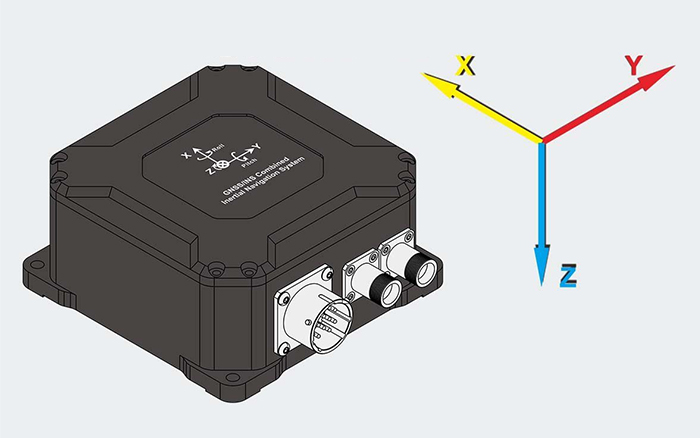
Enclosure Dimensions: L120×W120×H55mm(4 × M5 Screws)
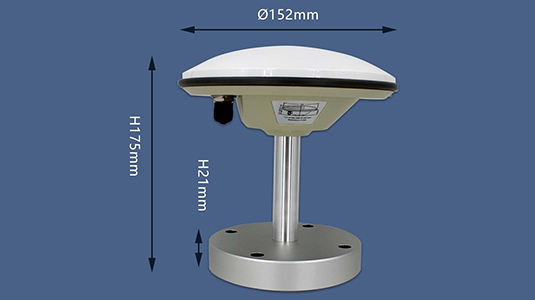
Antenna Dimensions: Ø152×H175mm
Strong Magnetic Base for Magnetic Mounting

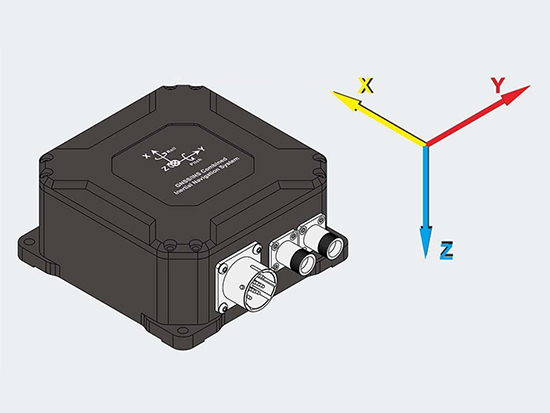
| Pin | Definition | Description | Pin | Definition | Description |
| 1 | VCC 12~36V | Power Positive | 7 | RS232_RXD | RTK Communication |
| 2 | GND | Power Negative | 8 | RS232_TXD | RTK Communication |
| 3 | RXD+ | RS422 Communication | 9 | NC | Not Connected |
| 4 | RXD- | RS422 Communication | 10 | NC | Not Connected |
| 5 | TXD+ | RS422 Communication | 11 | NC | Not Connected |
| 6 | TXD- | RS422 Communication | 12 | NC | Not Connected |

| IMU-4A | Parameters | ||
| System | Roll / Pitch / Heading Measurement Range | Roll ±180°, Pitch ±90°, Heading ±180° | |
| Roll / Pitch (1σ) | 0.2° | ||
| GPS-Denied Accuracy (Vehicle CEP) | Position Drift (1km or 3min) |
0.2%With Odometer Integration |
|
| Heading Drift (1min) | 0.15° | ||
| Gyroscope | Range | 300°/s | |
| Bias Instability (Allan Variance) | 10°/h | ||
| Bias Stability (1s Smoothing) | 15°/h | ||
| Bias Repeatability | 15°/h | ||
| Full-Temperature Bias | 0.1°/s | ||
| Scale Factor Nonlinearity | 200ppm | ||
| Scale Factor Repeatability | 200ppm | ||
| Resolution | <0.01°/s | ||
| Acceleration Sensitivity | <0.0028°/s/g,rms per axis | ||
| Angular Random Walk | 0.15°/√hr | ||
| Bandwidth | 200Hz | ||
| Latency | <2ms | ||
| Accelerometer | Range | 4g | |
| Bias Stability | 0.2mg | ||
| Full-Temperature Bias | 1.7mg | ||
| Scale Factor Repeatability | 200ppm | ||
| Resolution | 0.1mg | ||
| Nonlinearity | 0.1% | ||
| Bandwidth | 200Hz | ||
| Navigation board/card | Position (CEP) | 1.2m, 2cm+1ppm (RTK) | |
| Velocity (1σ) | 0.03 m/s | ||
| Heading (1σ) | 0.08° (2m baseline) | ||
| Frequency Band | GPS L1, L2, L2C, BeiDou B1, B2 | ||
| Electrical interface | Input Voltage | VCC 12~36V | |
| Operating Current | 0.55A | ||
| Interface Type | 12-pin Aviation Connector | ||
| Product list | Main Unit (1 pc) | Dimensions L120×W120×H55mm Weight ≤900g | |
| Main Unit Cable (1 pc) | Length ~1m Weight ≤170g | ||
| Satellite Antennas (2 pcs) | Dimensions Ø152×H175mm Weight ≤1050g | ||
| Antenna Cables (2 pcs) | Length ~10m Weight ≤425g | ||
| USB-to-Serial Converter (1 pc) | Length ~1m Weight ≤70g | ||





