E-mail:















| Product | L-D19 | L-D06 | L-D14 | |
| Type | at close range | |||
| Ranging Principle | TOF Ranging (Supports indoor & outdoor use) |
Triangular Ranging (Supports indoor & outdoor use under strong ambient light; built-in anti-interference triangular ranging algorithm enables high-precision ranging in complex outdoor scenarios) |
||
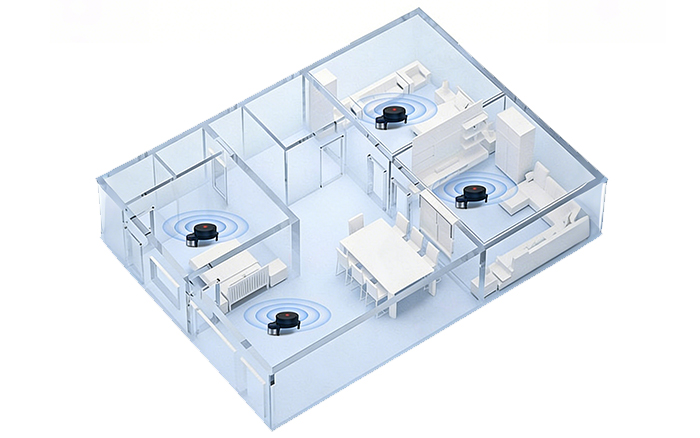
| Scanning Angle | 360° | |||
| Angular Resolution | 0.43°/step (typ. 0.72°) | 0.18°/step (typ. 0.54°) | ||
| Measurement Frequency | 5000 Hz | 4000 Hz | ||
| Scanning Frame Rate | 6–13 Hz (default 10 Hz) | 2–8 Hz (default 5 Hz) | ||
| Dimensions | 46×46×35.5 mm | 38.5×38.5×33.5 mm | 96.9×59.9×38.9 mm | |
| Weight | 45 g | 42 g | 31 g | |
| Measurement Distance Accuracy | range measurement0.03-0.5m:±10mm range measurement0.5-2m:±20mm white material:2-12m:±30mm black material:2-8m:±30mm |
士15mm@0.1~2m, STD 3mm 士30mm@≥2m, STD 10mm |
white material:0.1-0.5m:±5mm 0.5m-1m:±10mm 1m-6m:±1.0% 6m-8m:±1.5% black material:0.1-0.5m:±7mm 0.5m-1m:±12mm 1m-4m:±1.2% 4m-6m:±1.5% |
|
| Light Source | 905 nm Laser | 750 nm Laser | ||
| Measurement Radius | White objects: 12 m Black objects: 8 m |
White objects: 8–15 m Black objects: 6 m |
||
| Minimum Measurement Distance | 0.03m | 0.1m | ||
| Ambient Light Resistance | 60KLux | 80KLux | ||
| Data Content | Angle, Distance, Light Intensity | |||
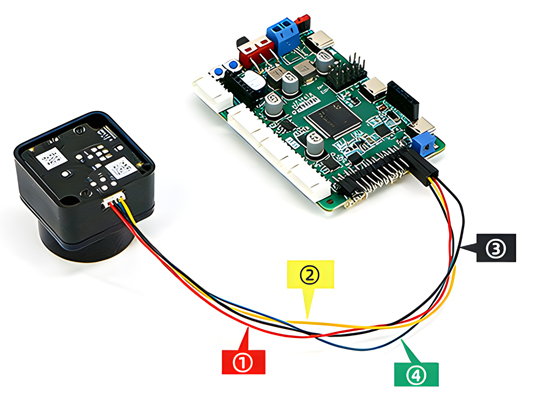
| Power Supply | 5V DC | |||
| Operating & Storage Temperature | Operating: -10~50℃ Storage: -30~70℃ |
Operating: -10~50℃ Storage: -30~70℃ |
||
| Driving Method | Built-in Brushless Motor | Built-in DC Brushed Motor | ||
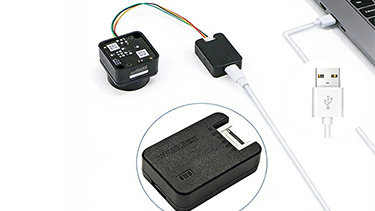
| Windows Support | Provides Windows Host Software | |||
| ROS Support | ROS1/ROS2 | |||
| STM32 Support | Supports STM32 data acquisition, provides data acquisition routines and radar obstacle avoidance code for STM32 single-chip microcomputers | |||
| Python Support | Supports Python 2.7 and Python 3.0 routines for radar data collection (runs on both Windows and Ubuntu) |
|||





